|
本商品は、販売終了いたしました。
なお機構部品については、パーツショップにて販売しております。 |
|
FIRST PICk ROBO V2は好評を頂いておりますFIRST PICkのロボット版です。
楽しみながらPICマイコンをステップbyステップで自習学習できるセットとしてロボットタイプの自立自走車両を採用し、PICマイコンのアーキテクチャの習得はもとよりモータやセンサといった周辺パーツの動作やインタフェースを考える課題となっています。
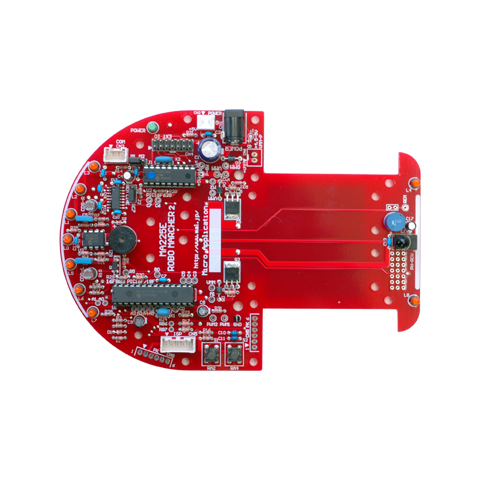
自立走行車の愛称はROBO-Marcher(ロボマルシェ)。メインCPUはFIRST PICkでもおなじみのPIC16F873、PICKIT3書込器からオブジェクトファイルをダウンロードして小さなプログラムからスタートします。
がんばってPICのステップをこなさなければROBO-Marcherはうまく走ってくれません。
プログラミングはアセンブラとCコンパイラにより双方のプログラムを実習します。
このようなアプローチは類を見ない手法です。 Cコンパイラは、無料のPICCを使用します。
基本的なセンサはCDS光センサとテレビ用リモコン受信器が用意されており、自立走行やリモコン走行ができます。さらにFIRST PICk
ROBOは多くの拡張性を持っています。LCDユニットによるデータ表示やシリアル通信モニタ、前進後退機能のモータドライバ、超音波センサ、ライントレースユニットなど、ステップ課題終了後もさらにロボマルシェをグレードアップできます。 |
|
|
|
|
|
| ●PICの基本アーキテクチャを習得可能 |
●PIC16F873Aを搭載・16F1936・18F26K22付属 |
| ●アセンブラ・C言語でのプログラミング |
●CDS光センサ |
| ●PICKIT3書込器でUSBからダウンロード |
●TVリモコン受光センサ |
| ●各周辺レジスタの機能を習得可能 |
●補助CPU(16F628)搭載 |
| ●プログラム構造と多重処理 |
●左右独立駆動モータ |
| ●モータやセンサの機能と駆動 |
●各種拡張センサユニットオプション |
| ●リモコン制御での走行 |
●前進・後退モータドライバオプション |
|
|
|
|
 |
|
●FIRST PICk ROBO 解説書
FIRST-PICkの目玉となる解説書。目次はこちらをご覧下さい。
ステップbyステップで知識を積み上げるスタイルの解説書です。
できる限りわかりやすい表現で書かれています。工学系学生以上の知識があれば内容を理解できます。 B5版・288ページ |
 |
|
|
 |
|
●PIC16F873Aを搭載・PIC16F1936とPIC18F26K22デバイス付属
ミッドレンジPICマイコンである16F873を搭載。
多くの周辺機能がロボマルシェの走行をバックアップ。
最新エンハンスドコアPIC16F1936と高性能、PIC18F26K22も付属し、
新しいPICの世界も発見できます。 |
・16F873A
・16F1936
・18F26K22 |
|
|
 |
|
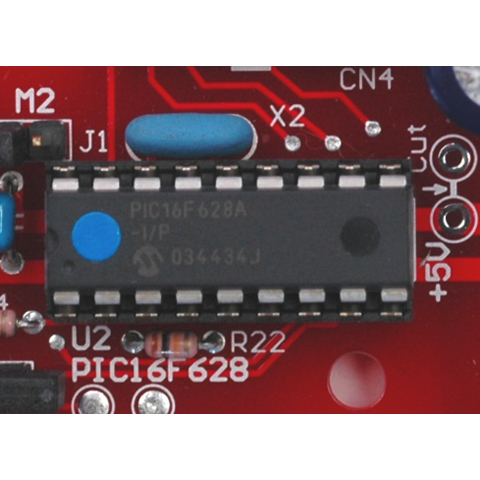
●サブPICとしてPIC16F628を搭載
18PのPICマイコンはテレビリモコンの受光機能を持っており、オプションのLCDユニット(各自組立)を搭載することでシリアル通信モニタとして機能する。 |
|
|
|
|
|
 |
|
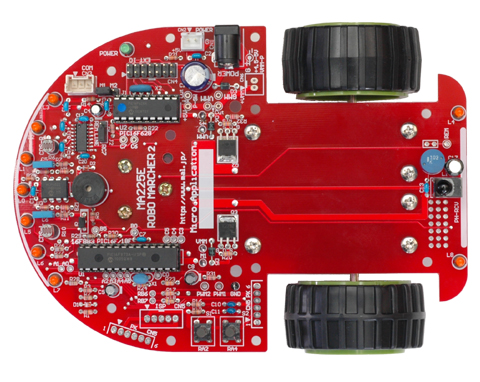
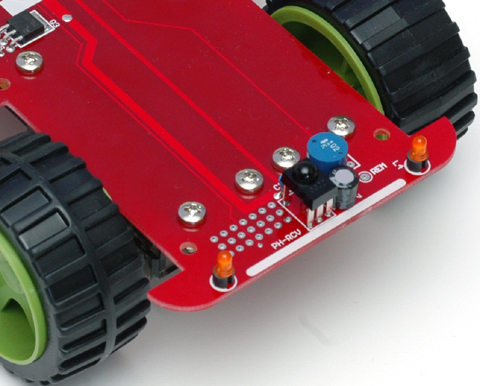
●走行系・動力部
3点支持の走行車輪、前輪はボールキャスタ使用。
モータは左右独立のツインモータ。減速機能。(走行系は各自組立) |
|
|
 |
|
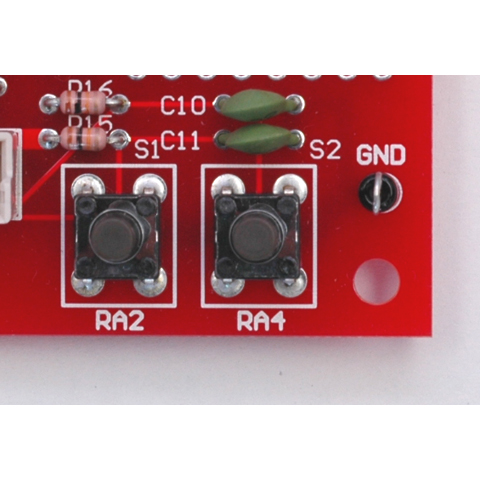
●コマンドスイッチ
小型のタクトスイッチを2個装備。 |
|
|
 |
|
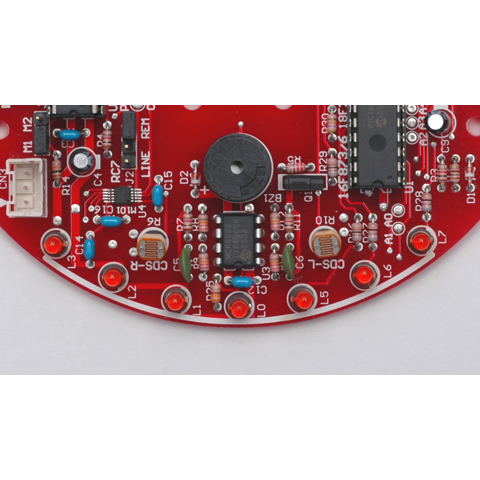
●LED・ブザー・CDS光センサ
ロボマルシェのハートを表現するLEDランプとブザー
CDS光センサは明るさを検出できるセンサ。左右2個を装備します。 |
|
|
 |
|
●リモコン受光センサ
テレビ用のリモコン信号を受信する。パナソニック製と東芝製のリモコンに対応。 |
|
|
 |
|
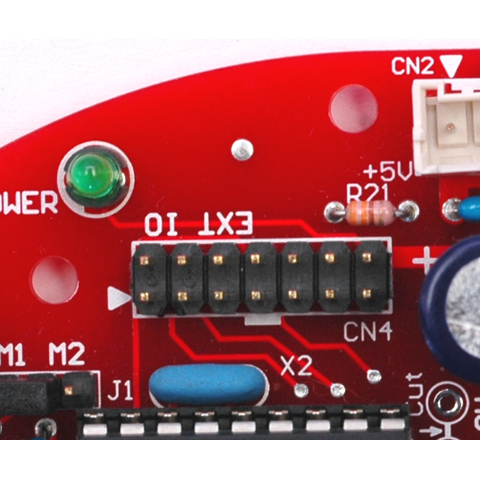
●拡張I/O
16F873・16F628の拡張用I/O。LCD接続にも使用。 |
|
|
 |
|
●構成図
|
|
|
|
|
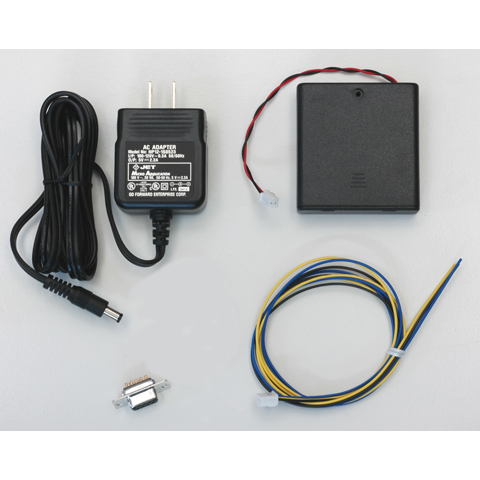
| ■FIRST PICk ROBO V2 (注文番号 FP-ROBO-V2) には、以下のものが含まれます。 |
| ●解説書 ●V2スタートガイド ●CD-ROM |
| ●本体基板(MA225) ●通信ケーブル(各自組立) ●5V ACアダプタ(BPP-PWR-5V) |
| ●接続ワイヤ ●電池ケース(予備コネクタ) |
| ●PICKIT3 (USBケーブル) |
| ●自在ギアボックス(各自組立) ●タイヤ(各自組立) ●ボールキャスター(各自組立) |
|
|
|
| ◇ユーザ側で用意するもの(商品に含まれないものですので、ご注意ください。) |
| 1.パソコン WindowsXP・7 |
| 2.シリアル通信ポート(USB使用可) |
| 3.工具 ニッパ、ドライバなど |
| 4.はんだごて |
| 5.テスター |
| 6.単3電池(ニッケル水素奨励) |
| 7.テレビ用リモコン(パナソニック・東芝のみ) |
|
| ◇あると便利なもの(商品に含まれないものですので、ご注意ください。) |
| 1.オシロスコープ |
| 2.電子部品 |
|
|
|
|
|
 |
|
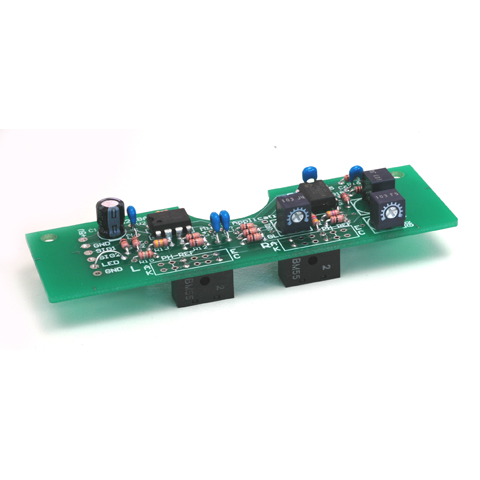
●ライントレースセンサユニット(FP-ROBO-UNIT2)
ライントレーサ用のセンサユニットです。
ライントレーサとは走行面にラインを引いてそのラインに沿って走行させる方法です。 ラインを検出しながらゆっくり進みます。
その他に「かけっこ」など走行面のラインを利用した遊びに利用できます。
キット形態で販売します。 (各自組立) |
|

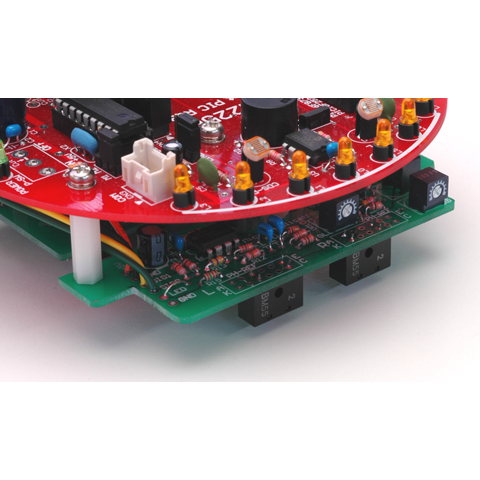
接続例 |
|
|
 |
|
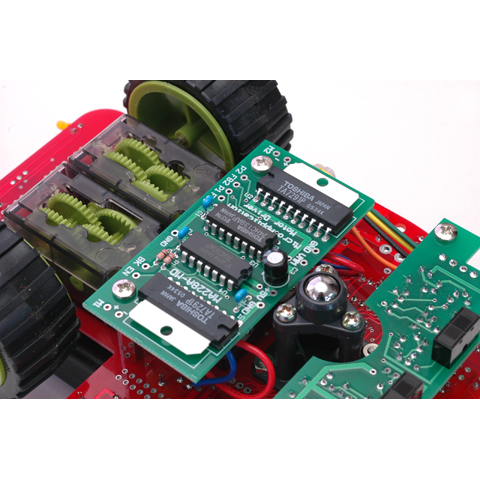
●モータブリッジ制御ユニット(FP-ROBO-UNIT1)
ロボマルシェは前進走行しかできません。
バック走行をさせるためのモータ双方向回転ドライバです。
キット形態で販売します。 (各自組立) |
|
|
 |
|
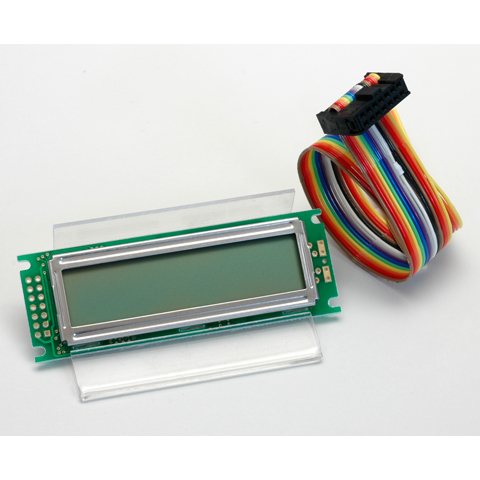
●LCDユニット(各自組立)(FP-ROBO-OPT1)
サブPICの通信モニタに利用するためのLCDユニットとケーブル
ケーブルは各自半田付けをして組立。 |
|
|
 |
|
●PICKIT延長ケーブル(PICkit-OPT2)
PICKITを延長して接続するためのケーブル
延長ケーブルを使用するとPICKITに無理がかからずに接続することができます。 |
|
 |
|
|
|
|
|
| PICの種類 |
PIC16F873A搭載 (付属デバイス PIC16F1936・PIC18F26K22 ) 他28pinデバイス搭載可能 |
| 発振回路 |
20MHz クリスタル発振 |
| リセット |
パワーオンリセット |
| PIC書込デバック |
PICKIT3によるダイレクト書込とデバック |
| |
|
| 通 信 |
RS232C シリアルインタフェース。Dsub9ピンコネクタにてパソコンダイレクト接続可能 |
| スイッチ |
2個 |
| ブザー |
発音体型ブザー |
| LED表示 |
5段9LED |
| LCD表示 |
16文字2行LCDユニット接続可能 シリアル通信モニタ 拡張I/Oを使用 |
| センサ |
CDS光センサ ・ TVリモコン受光センサ |
| 拡張I/O |
PIC16F873-6ポート PIC16F628-9ポート |
| モータ |
左右別ドライブモータ ギア減速装置 |
| モータ駆動 |
MOS-FETドライブ 前進のみ |
| 動作環境 |
温度 0〜40℃ 腐食性ガス、結露なし |
| 電 源 |
+5V電源 外部供給 又は 4.8V〜6V単3電池駆動 |
| 基本寸法 |
160 x 115mm |
|
|
|
|
| ■解説書内容 |
解説書は次のような内容で構成されています。 目次はこちらをご覧下さい。
V2では小冊子スタートガイドにより新しいアプローチを解説します。 |
| Chapter1. |
プログラミングの基礎 |
|
| Chapter2. |
環境設定と操作の基本 |
| Chapter3. |
PICの基本機能とプログラム |
| Chapter4. |
PICマイコンの応用機能 |
| Chapter5. |
走行プログラム |
| Chapter6. |
センサを利用した走行プログラム |
| Chapter7. |
システムの拡張 |
|
|
|
|
| ●Dos/Vパソコン (Pentium500M以上) が必要です。WindowsXP・7環境で動作します。 |
| ●シリアル通信ポートを使用する課題があります。(USB変換タイプを利用可能。) |
| ●製品の対象者は理工系大学・専門学校学生以上の方です。高校生、中学生は補助の方を必要とします。 |
| ●モータ周辺の動力部は各自組立になります。 |
| ●ケーブル・オプション・モータ部分に半田づけ作業があります。 |
| ●各車両には個体差があり、掲載したプログラムが記載内容と一致する動作を行わない場合があります。 |
| ●内容は初心者の方を対称としていますが、ユーザのレベル差により難解な部分があるかもしれません。 |
| ●露出した車輪が回転するため、扱いによっては怪我の危険があります。 |
| ●本品は実験ボードのため使い方によっては回路を損傷させる場合があります。 |
|
|
|
| ●製品保証・修理につきましては、こちら>>> をご確認下さいますようお願い致します。 |
|
 |